

INTRODUCTION
Patients with paraplegia due to spinal cord injury (SCI) perform activities of daily living (ADL) while lying down or seated due to the loss of the ability to stand or walk. Such changes in living patterns induce complications by diminishing the functions of each organ, including the musculoskeletal system. Limited activities may lead to multiple problems in these patients, including reduced physical fitness, obesity, cardiovascular disease, osteoporosis, fracture, and muscle atrophy. Therefore, independent standing and walking presents numerous physiological benefits for paraplegic patients, including prevention of complications, such as osteoporosis, fracture, pressure ulcers, spasticity, joint contracture, and infection, while facilitating circulation, and easier hygiene management [1-4]. Furthermore, even if functional gait is impossible, training to stand or walk using a lower extremity assistive device could produce positive effects in all aspects of physical, mental, and social life [4,5].
Various assistive devices have been developed to help paraplegic patients stand and walk, and they have been applied to various degrees depending on the patient’s functional requirements. Of these, knee-ankle-foot orthoses (KAFO) are essentially the only assistive devices currently used for complete paraplegic patients in clinical practice. The KAFO is applied from the femur to the foot. In particular, it is prescribed to promote knee stability during standing and walking for patients with SCI, and it enables independent gait up to a certain distance [6].
Until recently, gait for patients with complete paraplegia due to SCI mostly consisted of gait using mechanical gait-assistive devices, such as KAFO. However, because KAFO lacks an external power source, it requires substantial upper limb muscle strength and has low energy efficiency. This increases the user’s fatigue from gait, and in serious cases, it may induce musculoskeletal injuries in the upper limbs [5-7]. KAFO devices are frequently utilized for standing postures or gait training, as opposed to functional gait. A previous study reported that among paraplegic patients with SCI who were discharged with a KAFO, only 14.7% continued to use the KAFO at home [8]. The result indicated that patients find it difficult to utilize KAFO as a gait-assistive device for ADL.
In response to the limitations of KAFO devices, exoskeleton robots are being developed to enable over-ground walking [9]. The exoskeleton gait-assistive robots can be worn directly owing to their light and simple structure and can assist with lower limb muscle strength by providing power through the motorized joint [10]. This will have an advantage in energy efficiency when walking, unlike walking with KAFO, which relies entirely on upper extremity muscle strength. Gait-using exoskeleton gaitassistive robots that enable over-ground walking can be used in an actual gait environment, such as outdoors, indoors, and in an environment with obstacles, thereby motivating users to walk [10,11]. Owing to these advantages, it is expected that walking with exoskeleton gaitassistive robots can make up for the limitations of using a traditional KAFO daily. However, in Korea, there have been few clinical studies on walking with exoskeleton gait-assisted robots in patients with SCIs. In particular, there was no study comparing this to walking with KAFO as a gait-assistive device to be used for ADL.
The purpose of the present study was to compare spatiotemporal variables and energy efficiency in an exoskeleton gait-assistive robot (ReWalk) device and KAFO in patients with paraplegia due to SCI and evaluate patient satisfaction througha usability evaluation questionnaire for both walking devices. As there was no suitable usability questionnaire for evaluating the usability of exoskeleton gait-assistive robots, the questionnaire was developed and applied through expert consultation.
MATERIALS AND METHODS
Subjects
This study was conducted on patients with SCIs who were admitted to the SCI ward at the National Rehabilitation Center between March 2017 and March 2019. The inclusion criteria were at least 3 months since injury, T1– L5 SCI, the American Spinal Injury Association (ASIA) impairment scale A or B, 18–59 years of age, capable of independent gait prior to onset, the height of 160–190 cm, and weight ≤100 kg.
The exclusion criteria were severe neurological disorder in addition to SCI (e.g., multiple sclerosis, cerebral palsy, amyotrophic lateral sclerosis, traumatic brain injury, or stroke), a recent history of medical disease (e.g., infection, cardiovascular disease, or pressure ulcer), spinal instability, unhealed wound in the extremities, pelvic fracture, hip and knee range of motion (ROM) ≤90º, severe spasticity, severe osteoporosis with a risk of fracture, mental or cognitive disturbances that hinder gait training, history of treatment using exoskeleton gait-assistive robots, and failure to provide consent for study participation.
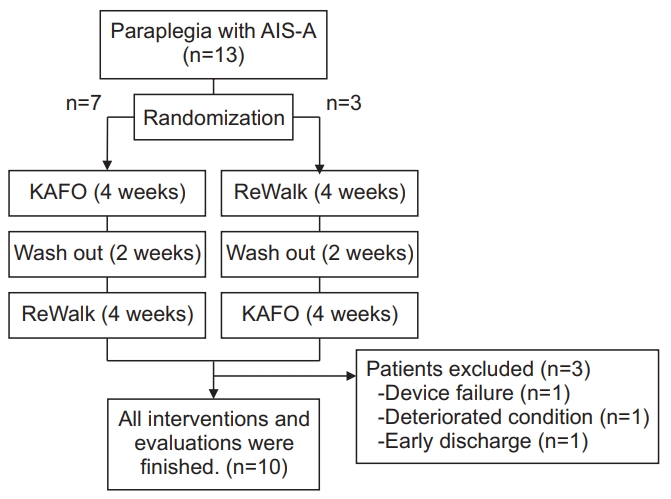
Based on sample size computation on G*Power calculated with a power of 0.90 and an α error probability of 0.05, the sample size was determined to be 11 patients [12]. We recruited 13 patients considering the 10% drop-out rate. The recruitment of patients was made through voluntary support from patients after the recruitment announcement, of which a total of 13 patients who met the inclusion criteria were enrolled in the study.
Of the 13 recruited participants, 1 participant who completed both the KAFO- and ReWalk-gait training was excluded owing to evaluation device failure, and 1 participant dropped out of the study owing to worsening of the condition. One participant only completed the KAFOgait training and evaluation due to early discharge. Thus, only 10 participants completed all training and evaluation sessions, and their data were used for the final analysis. Per random assignment, 7 participants underwent training in the order of KAFO-gait to ReWalk-gait, while 3 underwent training in the order of ReWalk-gait to KAFO-gait (Fig. 1).
Intervention
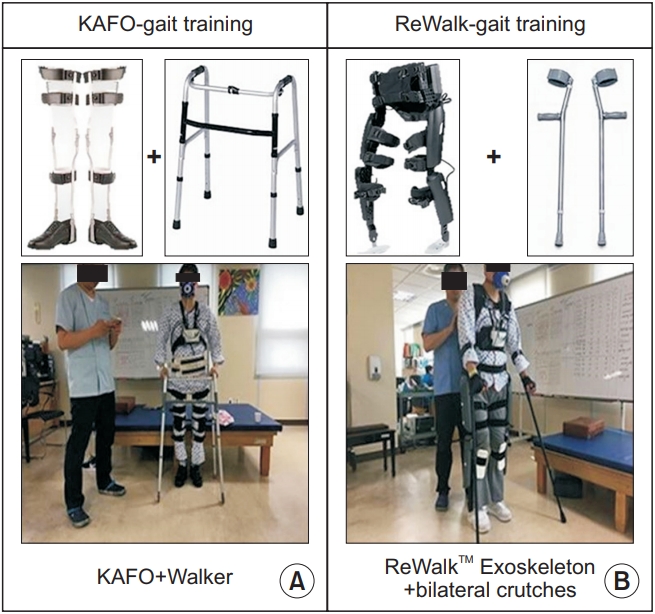
In the present study, gait using a KAFO brace, a traditional gait-assistive device, was defined as “KAFO-gait,” and gait using a ReWalk was defined as “ReWalk-gait”. The ReWalk exoskeleton (ReWalk Robotics, Yokneam Illit, Israel) and KAFO devices were used. During gait training, a walker was used during KAFO-gait training, and bilateral forearm crutches were used during ReWalk-gait.
When using the KAFO, the patient’s center of gravity is placed anteriorly in the standing position with the support of a walker. First, the walker is advanced, which is followed by trunk motion and pelvis rotation to advance each foot forward. ReWalk requires a bilateral forearm crutch to support the body weight. When both crutches are advanced simultaneously and a present machine amount of anterior truncal tilting (4°–20°) occurs, the tilt sensor senses this inclination and sequentially advances each foot (right then left foot) forward, producing a gait (Fig. 2).
A random cross-over design was used, and the order of training was assigned randomly. Participants underwent 20 sessions (60–90 minutes) of either ReWalk-gait training or KAFO-gait training over 4 weeks. After a 2-week washout period, they switched to the other type of gait device to undergo either KAFO-gait or ReWalk-gait training for an additional 4 weeks (20 sessions).
Assessment
The primary outcome of this study was energy efficiency. This study aimed to confirm whether ReWalk-gait is more efficient than KAFO-gait. The secondary outcomes were to evaluate spatiotemporal variables (walking distance and speed) and usability.
Gait evaluation was performed using the 6-minute walking test (6MWT) and the 30-minute walking test (30MWT). In each test, spatiotemporal variables and energy consumption were measured and compared between KAFO-gait and ReWalk-gait. Four evaluations were performed, with two evaluations per gait device. A midtest was performed after 2 weeks (or 10 sessions) and a final test was performed after 4 weeks (20 sessions) for each gait device.
The 6MWT is a test that measures total distance after walking as much as possible for 6 minutes on a flat, solid floor. This is a submaximal exercise, and owing to its advantages of better reflecting a patient’s ADL, it is used as a gait evaluation tool for patients with stroke or SCI [13].
As there are no available tools for evaluating longdistance walking of more than 30 minutes, we developed a 30MWT. We determined that a 30MWT was necessary to determine whether the gait-assistive devices, analyzed in this study, could be utilized in ADL outside the laboratory setting. The 30MWT was deemed an appropriate measure because these devices could be utilized in ADL when the patient is able to walk continuously for 30 minutes using the device.
As spatiotemporal variables, walking distance, walking speed, and cadence per minute were measured, and energy efficiency was measured based on heart rate (HR) and oxygen consumption (VO2) during the 6MWT and 30MWT.
Oxygen consumption as measured using the K4b2 portable metabolimeter (COSMED, Rome, Italy) and HR was measured using the Polar T31 monitor (Polar Electro, Kempele, Finland). For energy consumption, the following 7 parameters were measured: HR, maximum HR (HRmax), Physiological Cost Index (PCI), VO2, maximum VO2 (VO2max), metabolic equivalents (METs), and energy expenditure (EE).
PCI is a simple measure of energy consumption obtained by dividing the difference of the HR during gait and resting HR by gait speed. The VO2max refers to the maximum amount of VO2 per unit time during exercise. Because VO2 increases with increasing exercise intensity, it is a measure of exercise intensity and physical endurance. METs are an indicator of exercise intensity and defined as the ratio of VO2 during various exercises to the resting VO2, where the amount of oxygen required to maintain a resting state is 1 unit, i.e., 1 MET. EE is an index of energy consumed per minute during an activity measured in calories. It indirectly indicates energy expenditure based on VO2.
Due to the lack of an appropriate usability evaluation tool to compare ReWalk and KAFO in the literature, we developed a usability evaluation questionnaire for gaitassistive devices comprising of 4 domains (safety, effect, efficiency, and satisfaction) based on expert consultation and with reference to the International Organization for Standardization/International Electrotechnical Commission (ISO/IEC) standards. Each item is rated on a 5-point Likert scale. After administering the questionnaire to patients, opinions from patients, their doctors, and therapists were reflected to modify and finalize the questionnaire. In the safety domain, 6 items were assessed: wearing of device, fixation, risk of physical injury, and handling of emergency situations. In the effects domain, 6 items evaluated muscle strength, ROM, gait capacity, pain, bowel functions, and positive psychological changes to identify the effects of the device. In the efficiency domain, 4 items examined the efficiency of the device, tension, ability to adjust, and difficulties; and in the satisfaction domain, there are 7 items evaluating fatigue, wearability, comfort of wearing parts, willingness, usability, recommendation, and overall satisfaction.
Statistical analyses
Participant demographics, clinical evaluation, gait evaluation, energy consumption, medical state evaluation, and training evaluation results were analyzed with descriptive statistics (mean±standard deviation), and values between the two groups were analyzed by Wilcoxon signed-rank test.
RESULTS
Participant demographics
Eight men and 2 women, with a mean age of 31±10.3 years, mean height of 173±6.2 cm, mean weight of 67±6.2 kg, and mean duration of illness of 26±19.4 months were evaluated. Regarding the neurologic level of injuries, there was 1 participant each with T4, T5, T6, and T8, 4 participants with T10, and 2 with T11 injuries. The ASIA impairment scale was A for all patients, and the lower limb muscle strength score was 0 (Table 1).
Comparison of gait parameters between KAFO-gait and ReWalk-gait training
Gait speed was significantly higher during KAFO-gait training than during ReWalk-gait training in the 6MWT (p=0.021), but there were no significant differences in gait distance and cadence. In the 30MWT, there were no significant differences in all gait parameters between the groups (Table 2).
Comparison of energy efficiency between KAFO-gait and ReWalk-gait training
Energy efficiency of KAFO-gait and ReWalk-gait training was compared in the final test, and the ReWalk-gait had a higher energy efficiency than the KAFO-gait. In the 6MWT, ReWalk-gait was found to have a significantly greater energy efficiency than the KAFO-gait across all parameters (p<0.05), except PCI (p=0.425). In the 30MWT, ReWalk-gait had a significantly greater energy efficiency than KAFO-gait across all parameters (p<0.05), except VO2max (p=0.125) and PCI (p=0.067) (Table 3).
Comparison of 30-minute walk distance and VO2 among participants
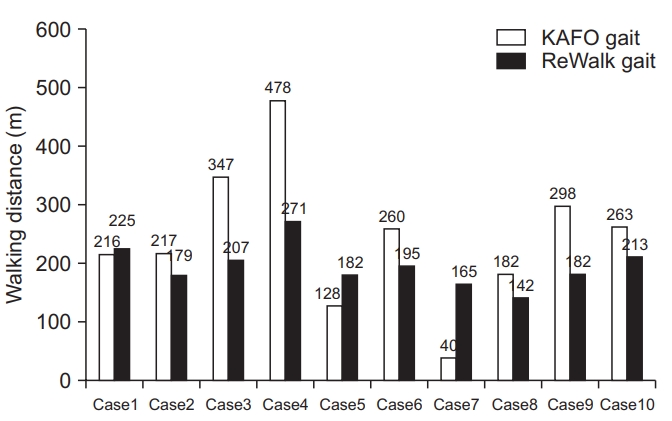
Individual differences in 30-minute walk distances were greater during KAFO-gait training than during ReWalkgait training. The mean distance was 242.9±119.8 m during KAFO-gait training, with a minimum distance of 40 m and a maximum distance of 478 m. During ReWalkgait training, the mean distance was 196.2±35.7 m, with a minimum distance of 165 m and a maximum distance of 271 m, with less individual variation compared to that in KAFO-gait training (p=0.031) (Fig. 3).
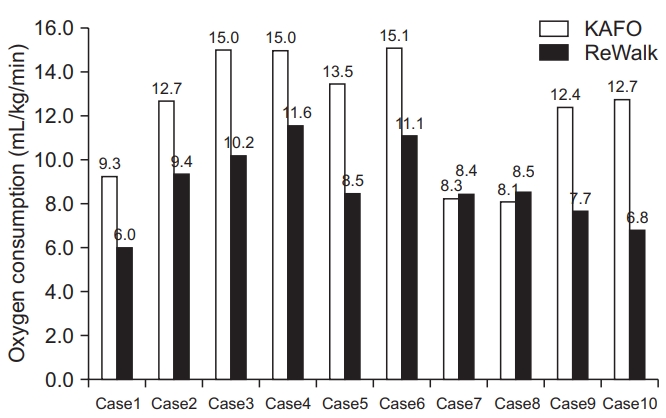
Individual differences in VO2 were lower during ReWalk-gait in all cases except for cases #7 and #8. During KAFO-gait training, the mean VO2 was 12.2±2.7 mL/kg/ min, with a maximum of 15.1 mL/kg/min and a minimum of 8.1 mL/kg/min. During ReWalk-gait, the mean VO2 was 8.8±1.8 mL/kg/min, with a maximum of 11.6 mL/kg/min and a minimum of 6.0 mL/kg/min. Individual differences in VO2 between KAFO-gait and ReWalkgaitwere not statistically significant (p=0.173) (Fig. 4).
Development and evaluation of KAFO-ReWalk usability evaluation questionnaire
Usability evaluation was conducted after 4 weeks of training for ReWalk-gait and 4 weeks of training for KAFO-gait using the evaluation questionnaire we developed (Table 4). The results showed that there were no significant differences across domains (safety, effects, efficiency, and satisfaction) in KAFO-gait and ReWalk-gait training. In the satisfaction domain, satisfaction tended to be higher for KAFO-gait than for ReWalk-gait training (p=0.086) (Table 5).
We conducted focus group interviews over 2 sessions with 6 participants who completed the study to further analyze why the ReWalk-gait evaluation scores were not higher. During the focus group interview, participants indicated “ReWalk is too bulky”, “difficult to wear alone”, “operating is difficult and complicated”, and “device is expensive” as the reasons for the moderate evaluations of ReWalk-gait. Conversely, some patients mentioned that “ReWalk is more appropriate than KAFO-gait for gait training, as opposed to daily walking” and that “ReWalk is more advantageous than KAFO when walking outdoors because forearm crutches are used”.
DISCUSSION
Previous studies administered 90-minute ReWalk gait training sessions 3 times a week for 8 weeks [14] or gait training until the patient achieved a certain standard of gait without limiting the duration and number of training sessions [10,15]. ReWalk gait training has also been used twice weekly for 10 weeks, for a total of 20 sessions, on 10 patients with SCIs (C8–L1) [16]. Gait training was conducted using ReWalk for 7 patients with SCIs (AIS A). Each training session lasted an hour, with 1 session per day, 5 times weekly for 4–5 weeks. The authors concluded that at least 20 training sessions were needed to achieve independent gait using ReWalk [17]. Based on these results, we designed our ReWalk training session to last 60–90 minutes per session, which was to be performed 5 times a week for 4 weeks, for a total of 20 sessions, to achieve a certain degree of walking.
Previous studies have shown that walking distance and walking skills clearly improved over the course of the training sessions [14,18]. Although there were no differences in distance and speed between the mid-test (after 10 sessions) and final-test (after 20 sessions) during KAFO-gait training in our patients, there were significant increases in distance and speed in the final test compared to that in the mid-test during the ReWalk training (p<0.05). These results suggest that increasing the duration of ReWalk-gait training would further improve gait distance and speed.
We conducted 6MWT and 30MWT to evaluate gait. Previous studies have evaluated gait capacity by measuring spatiotemporal variables, such as distance and time, during a 6MWT and 10-minute walk test [10,15,16,18], while others haveassessed the Berg Balance scale and Functional Ambulation Categories (FAC) scale scores through 40 m and 100 m continuous gait training [19]. Although tools for evaluating long-distance walking of >30 minutes are not available, we developed a 30MWT on the basis that devices can be utilized in ADL only when the patient is able to walk continuously for 30 minutes using the device.
Energy efficiency during walking was assessed based on seven VO2 and HR parameters: HR, HRmax, PCI, VO2, VO2max, METs, and EE. Previous studies have evaluated the energy cost of walking based on VO2 and HR [20], while others have measured HR and PCI to compare energy consumption during KAFO-gait training and gait using an exoskeleton robot—reciprocating gait orthosis (RGO), powered gait orthosis (PGO), Wearable Power-Assist Locomotor (WPAL) [12,21,22]. Their results showed that gait speed and distance were better during walking with the exoskeleton robot than with KAFO braces. Moreover, energy efficiency (e.g., HR, PCI) was also higher while walking with exoskeleton robots [12,21,22].
Previous studies havecompared various exoskeleton gait-assistive robots with KAFO and found that exoskeleton robots show better gait distance, speed, and energy consumption [12,21-23]. However, there have been no studies comparing ReWalk with KAFO. Unlike other exoskeleton robots, ReWalk can be used by complete paraplegic patients and can walk outdoors and climb stairs. In addition, ReWalk is approved for safety by the United States Food and Drug Administration. Thus, we compared ReWalk with KAFO and evaluated gait distance, speed, energy consumption, and user satisfaction to identify the benefits and shortcomings of the two approaches. Our results showed that ReWalk is significantly superior to KAFO in terms of energy consumption in both the 6MWT and 30MWT. In particular, in the 30MWT, which is a long-distance walking test, there was a significant reduction in energy consumption without differences in distance and speed between the two groups. These results are in line with previous findings whereby RGO and WPAL had higher energy efficiencies during gait training than KAFO, with little change in PCI and HR [21,22].
On comparing the gait distances among the 10 participants in this study, individual differences were the greatest during KAFO-gait and smallest during ReWalk-gait. In the 30MWT, there were strong differences among the participants (minimum 40 m and maximum 478 m) during KAFO training, which were much smaller (minimum 165 m and maximum 271 m) during ReWalk-gait training. The smaller individual differences in gait distance with high energy efficiency during ReWalk-gait suggests that patients can attain the ability to walk to a certain level with gait training using ReWalk regardless of their age, sex, and level of paralysis.
We evaluated the usability of KAFO and ReWalk as gaitassistive devices. A similar questionnaire, consisting of 10 questions about safety, comfort, and secondary medical effects was developed to evaluate the satisfaction of ReWalk use, which indicated that patients did not feel ReWalk was dangerous and felt comfortable, but they mentioned that it was highly challenging to wear and adapt to the device [11]. However, there have been no studies evaluating the satisfaction of the use of an exoskeleton gait-assistive robot and KAFOs using a questionnaire. We found that the ReWalk-gait device was not superior to KAFO-gait in all 4 domains of safety, effects, efficiency, and satisfaction, and particularly, satisfaction tended to be higher with KAFO-gait (p=0.086).
In contrast to our expectations and the higher energy efficiency obtained with the robot-assisted gait device, the usability evaluation results showed that patients perceived the ReWalk device to have no added benefits compared to the KAFO braces. This implies that gait-assistive robots need more improvement. In the focus group interview that we conducted to identify the reasons behind the patients’ responses, patients mentioned that the gaitassistive robot is too bulky, difficult to wear, difficult to operate, and too costly. Thus, improvements need to be focused on these factors.
Upper extremity pain and back pain were evaluated before and after the study, and there were no cases of newly developed back pain. All upper extremity pain occurred at the wrist. Four of the 10 users, after KAFO-gait and 6 of the 10 users, after Rewalk-gait, experienced wrist pain. Complete paraplegic patients are prone to upper extremity overuse while creating independent gait patterns. ReWalk-gait, which assists the lower extremity muscles, is expected to reduce upper limb pain by preventing upper extremity overuse compared to that of KAFO-gait. However, this study did not show any difference in upper extremity pain occurrence. Currently, this occurrence of pain limits the use of robots as a means of gait replacement for complete paraplegic patients.
The significance of this study is that it proposed a standard regarding the walking surfaces on which gaitassistive robots could be compared to KAFO braces. This standard is useful for comparing KAFO braces with gaitassistive robots that will be developed in the future or for comparing different robots. Secondly, we evaluated energy efficiency based on HR and VO2. This was done particularly, because, in patients with SCI above T1, HR does not increase proportionately to VO2. Thus, it may be in accurate to evaluate energy efficiency solely based on HR.
One limitation of this study is that we limited the length of ReWalk-gait training to 20 sessions. Our results showed that gait distance and speed continued to increase over the course of the training sessions for ReWalk-gait. Therefore, it is speculated that a greater number of training sessions would have been needed to examine maximum gait distance, speed, and energy efficiency with ReWalkgait more accurately. Secondly, because KAFO-gait training has been utilized for a long time and patients had no difficulty adjusting to the device; therefore, gait training was performed accurately from the first session. Conversely, patients required a significant amount of time to adjust to the assistive robot for ReWalk-gait training, and a uniform application of the training protocol was impossible because patients varied in terms of proficiency with the existing training protocol. This posed challenges in the early stage of the study, and a more detailed training protocol was established over the course of the training. Thirdly, the reliability and validity of the 30MWT and the usability test conducted in this study were not verified. Fourthly, the energy efficiency differences resulting from the use of different upper limb devices (bilateral forearm crutches and walker) were not considered. Finally, in this study, many patients experienced wrist pain due to overuse of the upper limbs during gait training. ReWalkgait did not reduce the incidence of upper limb pain compared to conventional KAFO-gait. In patients with complete paraplegia who perform all ADL using only upper extremity muscle strength, upper limb injury has a direct impact on independence and quality of life. The occurrence of this musculoskeletal pain shows that the use of robots, as a walking aid for daily life, is very limited. In order to prevent upper limb pain, it is necessary to improve gait protocols in order to ensure that patients undergo sufficient upper extremity strength training before gait training and to improve gait-assistive robots including upper limb devices.
Future studies should not limit the number of ReWalkgait training sessions to 20 and should identify the most appropriate number of training sessions to achieve maximum improvement of gait functions. Moreover, studies should also establish treatment protocols for each session in order to apply an identical gait training protocol for all patients. In addition, further studies on the reliability and validity of the 30MWT and usability test will be needed.
In conclusion, on comparing robot-assisted gait training and KAFO-gait training after 20 sessions of training in paraplegic patients with SCI, ReWalk-gaitwas found to have higher energy efficiency during walking than KAFO-gait. However, in the usability evaluation, patients did not rate ReWalk-gait to be superior to KAFO-gait.